
SPVLoc: Semantic Panoramic Viewport Matching for 6D Camera Localization in Unseen Environments
ECCV 2024
Fraunhofer Heinrich Hertz Institute, HHI1, Humboldt University of Berlin2
🌐 Project Page | 📄 Paper | 🖼️ Poster | 🐙 Github | 🚀 Demo
{kind=link}
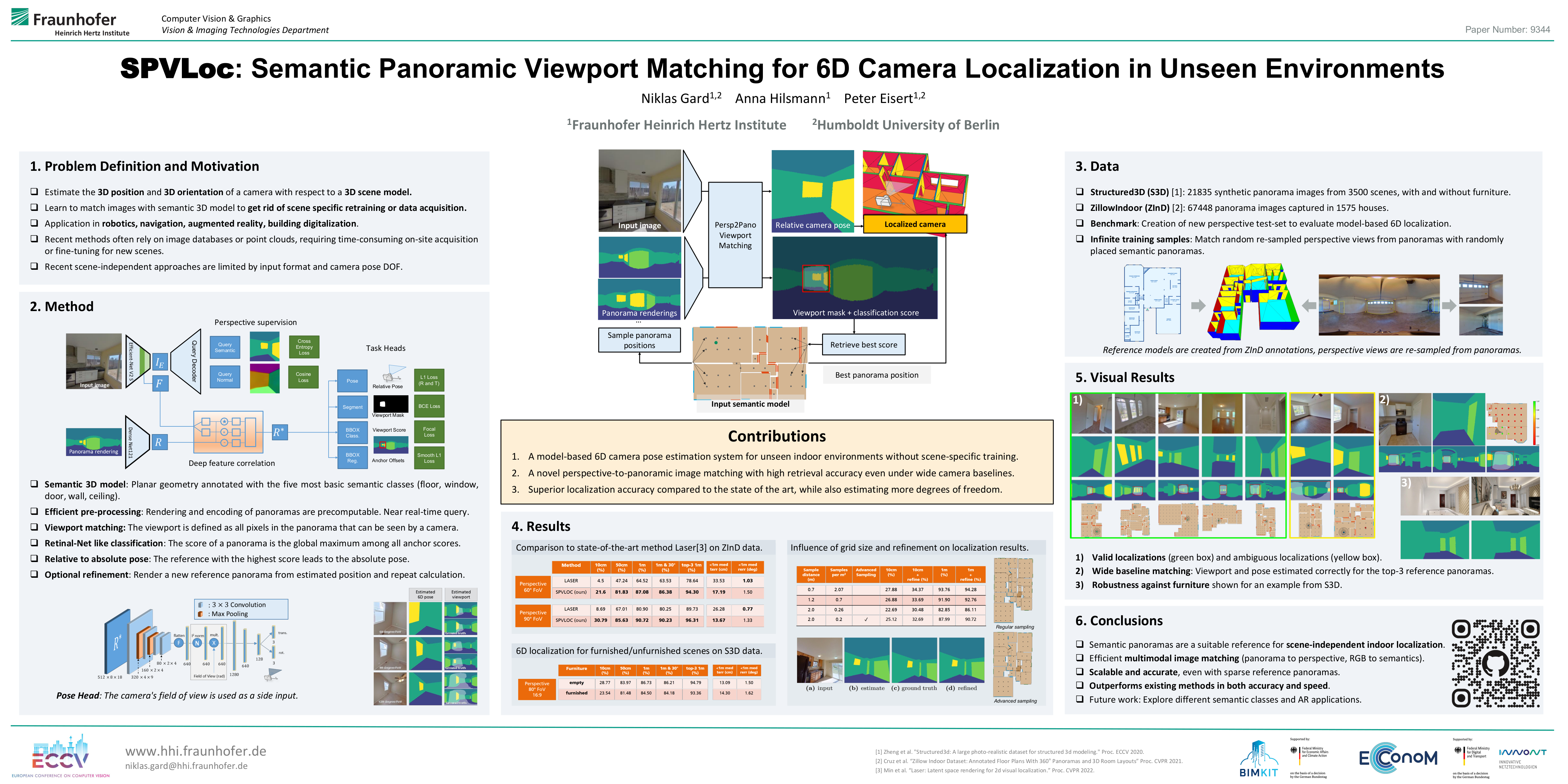
SPVLoc estimates the indoor 6D camera pose by determining the image position and orientation relative to a minimalistic, semantically annotated 3D model. This model is represented by a set of synthetic panoramic images, from which the method identifies the optimal panoramic match using semantic viewport matching. Finally, the 6D pose is estimated relative to the location of the best-matching panorama.

🚀 Quick Demo
Check out our code and demo at github.

📚 Citation
If you find this code or our method useful for your academic research, please cite our paper
@inproceedings{gard2024spvloc,
title = {SPVLoc: Semantic Panoramic Viewport Matching for 6D Camera Localization in Unseen Environments},
author = {Niklas Gard and Anna Hilsmann and Peter Eisert},
year = 2024,
booktitle = {Computer Vision -- {ECCV} 2024: 18th European Conference on Computer Vision, Proceedings, Part LXXIII},
publisher = {Springer Nature Switzerland},
address = {Cham},
pages = {398--415},
doi = {10.1007/978-3-031-73464-9_24},
url = {https://fraunhoferhhi.github.io/spvloc/}
}
Inference Providers
NEW
This model isn't deployed by any Inference Provider.
🙋
Ask for provider support